N-470 Miniature Motorized Actuators with PiezoMike Motors
Miniaturized Design with Piezo Ratchet Motor
High Holding Force to 22lb, Push Force to 4.5lb
20 Nanometers Smallest Step Size
1/4" and 1/2" Travel
Lifetime >1,000,000,000 steps
Self-locking, Ratchet Design, Extremely Stable and No Heat Generation at Rest
Datasheet and Specs of the Miniature Motorized Actuator N-480 motorized kinimatic mirror mount .
Video: How the N-472 Miniature Motorized Actuator with PiezoMike Drive works
VIDEO
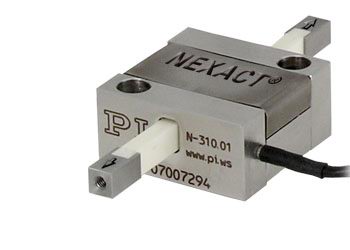
NEXLINE® / NEXACT® Nano-Positioning Linear Actuators N-310 Miniature Motorized Actuator NEXACT® Nanometer-Resolution OEM Piezo Stepping Drives with Long Travel Ranges
10 mm/sec Speed
20 mm Standard Travel Range
Compact and Cost-Effective Design
0.03 nm Resolution
To 10 N Push/Pull Force
Low Operating Voltage (40 V)
Self Locking, with no Heat Dissipation, Nanometer Stability
Non-Magnetic and Vacuum-Compatible Working Principle
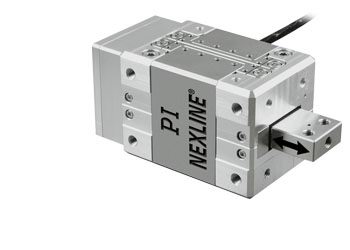
PDF Learn About Different Piezo Motors N-381 NEXLINE® Nanometer-Precision Piezo Nano-Positioning Actuator
Travel Range 30mm
Novel, Zero-Wear Piezo Stepping Drive, Ideal for Micro- and Nano-Manipulation Integrated Linear Encoder Option for Highest Accuracy with 20 nm Resolution
Very High Acceleration, e.g. for Cell Penetration
Two Operating Modes: Continuous Stepping Mode and Continuously Variable, High-Dynamics Analog Mode for 30 pm Resolution**
Up to 10 N Force Generation
Self-Locking at Rest, no Heat Generation
Smooth Motion, no Closed-Loop Jitter
Vacuum-Compatible and Non-Magnetic Versions
PDF Datasheet Learn About Different Piezo Motors
BACK to TOP
N-111 NEXLINE® Miniature PiezoMotor Acuator with Nanometer Accuracy
Travel Range 10mm
Resolution to 0.025 nm Open-Loop,
5 nm Closed-Loop
Up To 50 N Force Generation and 70 N Holding Force Self Locking at Rest, Non-Magnetic and Vacuum-Compatible Working Principle
Cleanroom Compatible
PDF Datasheet Animation How NEXLINE Motors Work N-216 NEXLINE® Linear Actuator with
High-Force PiezoWalk® Drive and Nanometer Accuracy for Long-Range Nanopositioning
Travel Range 20mm
Resolutionto 0.03 nm Open-Loop, 5 nm Closed-Loop
Up to 800 N Holding Force
Self-Locking at Rest
Non-Magnetic and Vacuum-Compatible Working Principle
Cleanroom Compatible
PDF Datasheet Animation How PiezoWalk Motors Work
BACK to TOP
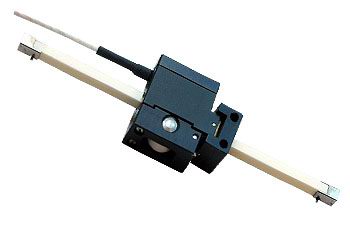
Nonmagnetic PiezoWalk-Motor Miniature Actuator Concept with Nanometer Resolution
Piezo-Walk Motor-Driven Linear Actuator
Works in High Magnetic Fields (MRI)
Up to 70mm Motorized Positioning Range
Self-Aligning & Self Locking Design
Made from non-magnetic materials
More on Piezo Motors Ask an Engineer Fast Automation Precision Actuator with Voice Coil Linear Motor
Different Models, Force Generation up to 20 N
High Speed, to 750mm/sec
Closed-Loop Force and Position Control
Integrated Linear Encoder
Optional Force Sensor
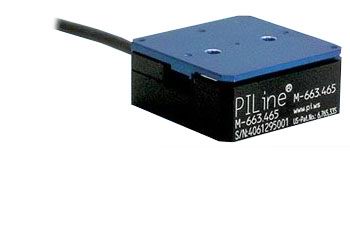
Video and Application Article Ultrasonic-Motor-Driven Miniature Precision Positioner
Compact High-Speed Stage with Closed-Loop Linear Motor & Linear Encoder
18mm to 100mm Travel Range
Velocity up to 200mm/sec
Resolution to 10 Nanometers
Integrated Direct-Metrology Linear Encoder
AutoLock Feature
XY Stage Available
20000 h MTBF
Vacuum Versions Available
Non Magnetic Option
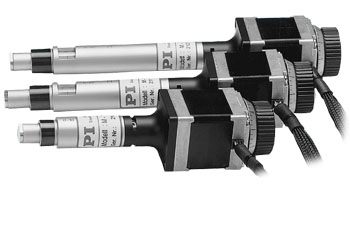
PDF Datasheet Overview: Compact Positioning Stages with Ultrasonic Motors Motorized Actuators M-227 High-Resolution Servo Motor Precision Actuators
10, 25 & 50mm Travel Ranges
50 Nanometers Minimum Incremental Motion
Non-Rotating Tip
Closed-Loop DC Motor
Compatible with Leading Industrial Motion Controllers
Sub-Nanometer Precision with Optional PZT Drive
>5,000 Hours MTBF
PDF Datasheet Linear Actuator Online Datasheet M-228, M-229 Low Cost Precision Motorized Linear Actuator, Stepper-Motor, with Limit Switches
Cost-Efficient Design
10mm or 25 mm Travel Range
46 nm Resolution (with C-663 Controller)
50 N Load Capacity (M-229)
Non-Rotating Tip
Max. Velocity 1.5 mm/s
Non-Contact Limit and Reference Switches
Compact Design
M-228 PDF Datasheet
M-229 PDF Datasheet M-228 - M-229 Linear Actuator Online Datasheet
BACK to TOP
M-230 High-Resolution Closed-Loop Servo Motor & Stepper Motor Precision Actuators
10 & 25 mm Travel Range
50 Nanometers Minimum Incremental Motion
10 Nanometer Resolution
Non-Rotating Tip
Velocity to 2 mm/sec.
Closed-Loop DC Motors and Stepper Motors
Compatible with Leading Industrial Motion Controllers
Integrated Hall-Effect Origin and Limit Switches
Front Mount or Clamp Mount
>5,000 Hours MTB
PDF Datasheet Linear Actuator Online Datasheet
BACK to TOP
M-232 Compact, High-Resolution, Closed-Loop Servo Motor Precision Actuator
17 mm Travel Range
100 Nanometers Minimum Incremental Motion
Velocity up to 2.5 mm/sec.
Closed-Loop DC Motor
Compatible with Leading Industrial Motion Controllers
Integrated Hall-Effect Limit and Origin Switches
Fits M-105 & F-110 Fiber Aligners
>5,000 Hours MTBF
PDF Datasheet Linear Actuator Online Datasheet M-235 Heavy-Duty High-Resolution Closed-Loop Servo & Stepper Actuators
20mm or 50mm Travel Range
100 Nanometers Minimum Incremental Motion
High-Speed Direct Drive Option
120 N Push/Pull Load
100 N Lateral Load Limit
Preloaded Ultra-Low-Friction Ball Screw with Non-Rotating Tip
Closed-Loop DC Motors and Stepper Motors
Compatible with Leading Industrial Motion Controllers
Integrated Hall-Effect Limit & Origin Switches
>20,000 Hours MTBF
Vacuum Versions
PDF Datasheet Linear Actuator Online Datasheet
BACK to TOP
M-238 Heavy-Duty Precision Linear DC-Motor Actuator
High Load Capacity to 400 N
Optional 100 Nanometers Direct Metrology Linear Encoder for Exceptional Precision
Travel Range to 50mm
Max. Velocity: 30mm/sec
Preloaded Frictionless Ball Screw
MTBF >20.000 h
Vacuum-Compatible Versions Available -6 hPa
PDF Datasheet Linear Actuator Online Datasheet M-168 High-Resolution Motorized Stepper-Mike Actuators
10, 25 & 50mm Travel Ranges
Resolution <100 Nanometers
2- and 5-Phase Stepper Motor
Manual Positioning Knob
Sub-Nanometer Precision with Optional PZT Actuator
>5,000 Hours MTBF
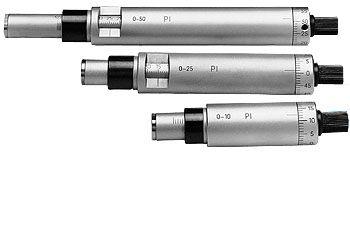
PDF Datasheet Linear Actuator Online Datasheet Precision Micrometer Actuators
10, 25 and 50mm Travel
Pitch 0.5 mm/Rev.
Low-Friction Construction
1 Micron Manual Sensitivity
Sub-Nanometer Resolution with Optional PZT Actuator
PDF Datasheet Linear Actuator Online Datasheet
BACK to TOP
Flexure-Guided Nano-Positioning Actuators P-601 Nanometer Accuracy Piezo Lever Amplified Actuator with Flexure Guiding
Flexure Guidance for Frictionless, Ultra-Straight Motion
Travel Ranges to 480 Microns
0.2 Nanometer Resolution
High Dynamics and Stiffness
PICMA® High-Performance Piezo Actuators
Open and Closed-Loop Versions
Ideal for OEM Applications
PDF Datasheet Introduction to Flexure Actuators P-602 Nanometer Accuracy Flexure Actuator with High Stiffness.
Integrated Guiding System, High Force and Large Travel Ranges
Frictionless Flexure Guiding System for Straight Motion
Integrated Motion Amplifier for Travel Ranges to 1 mm
High Dynamics and Stiffness, Forces to 400 N, Backlash-Free Construction
Outstanding Lifetime Due to PICMA® Piezo Actuators
Available with Integrated Position Sensor
Custom Designs with Larger Travel or Faster Response and Non-Magnetic Versions Feasible
Ideal for OEM-Applications in Adaptronics, Biotechnology or Microfluidics
PDF Datasheet Linear Actuator Online Datasheet P-603 Nanometer Accuracy Linear Actuator: Low-cost, Flexure Guided, Large Travel Ranges
Frictionless, High-Precision Flexure Guiding System
Travel Ranges to 500 microns
Cost-Effective Design Outstanding Lifetime Due to PICMA® Piezo Actuators
Available with Integrated Position Sensor
Ideal OEM Actuators for Precision Motion Control in Optics, Medical, Biotech and Microfluidics Applications
Custom Designs with Larger Travel or Faster Response and Non-Magnetic Versions Feasible
PDF Datasheet Linear Actuator Online Datasheet P-290 Long-Travel Piezoelectric Z-Nano-Precision Flexure Stage / Actuator
Vertical Travel to 1000 Micron
Integrated Double-Flexure Motion Amplifier
Non-Magnetic Stainless Steel Design
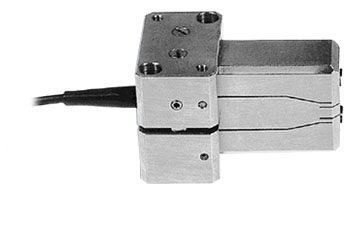
PDF Datasheet Linear Actuator Online Datasheet P-753 LISA Piezoelectric Positioning Stage with Nanometer Accuracy for NanoAutomation®. Featuring Direct Metrology
Unique Design: Both Stage and Actuator
Frictionless Precision Flexure Guiding System
0.05 Nanometer Resolution
Direct Metrology with Capacitive Sensors for Highest Precision
Ultra-Fast Response, Very Compact
PICMA® High-Performance Multilayer Piezo Drives
ID-Chip for Auto Calibrate Function
Vacuum Versions Available
PDF Datasheet Linear Actuator Online Datasheet Piezo Actuators P-882 P-888
PICMA® High-Performance Monolithic Multilayer Piezo Actuators, Sub-Nanometer Resolution
Award-Winning Technology
Low Operating Voltage
Superior Lifetime Even Under Extreme Conditions
Very Large Operating-Temperature Range
High Humidity Resistance
Excellent Temperature Stability
High Stiffness
UHV Compatible to 10-9 hPa
Sub-Millisecond Response & Sub-Nanometer Precision
PDF Datasheet Linear Actuator Online Datasheet P-007 P-056
PICA™ -Stack / High Force Piezoceramic Actuators, Sub-Nanometer Resolution
High Load Capacity to 100 kN
High Force Generation to 80 kN
Large Cross Sections to 56 mm Diameter
Variety of Shapes
Extreme Reliability >1000,000,000 Cycles
Proven and Flexible Design
Sub-Nanometer-Resolution / Sub-Millisecond-Settling-Time
Vacuum-Compatible Versions
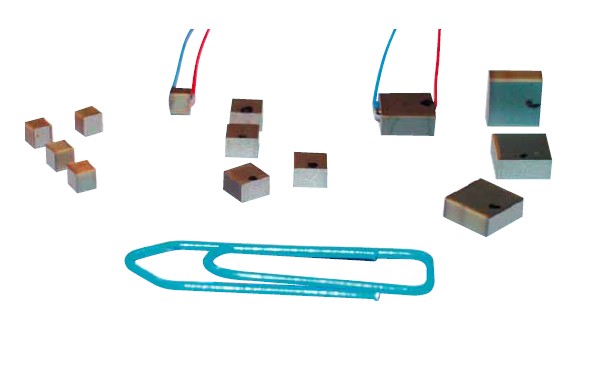
PDF Datasheet Linear Actuator Online Datasheet PL022 PICMA® Chip Miniature Piezo Actuators
Ceramic Encapsulation for Extended Lifetime
Ultra-Compact, from 2 x 2 x 2 mm
High Curie Temperature
Ideal for Dynamic Operation
Sub-Millisecond Response / Sub-Nanometer Resolution
UHV Compatible to 10-9 hPa
Superior Lifetime
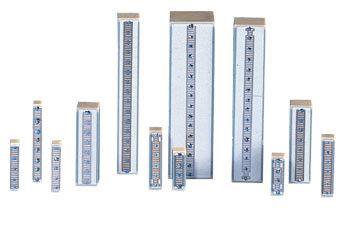
PDF Datasheet Linear Actuator Online Datasheet P-840 - P-845 Preloaded Piezo Translators (LVPZT), Sub-Nanometer Resolution
Displacement to 90 microns
Pushing Forces to 3000 N
Preloaded for Pulling Forces to 700 N
Sub-msec Response
Sub-Nanometer Resolution
Options: Ball Tip, Vacuum Versions
P-840 · P-841 PDF Datasheet Linear Actuator Online Datasheet
P-844 · P-845 PDF Datasheet Linear Actuator Online Datasheet
BACK to TOP
P-212 · P-216 & P-225 · P-235 Preloaded PICA Power Nano-Precision Piezo Actuators, High Force
Travel Range to 180 microns
Pushing Forces to 4,500 N or 30,000 N
Pulling Forces to 500 N or 3,500 N
Sub-ms Response
Sub-Nanometer Precision
Options: Vacuum, High- and Low-Temperature
P-212 · P-216 PDF Datasheet Linear Actuator Online Datasheet
P-225 · P-235 PDF Datasheet Linear Actuator Online Datasheet P-871
Closed-Loop, High-Deflection PICMA® Multilayer Nano-Precision Piezo Bender Actuators
Closed-Loop Operation for Superior Accuracy
Nanometer-Resolution
Deflection up to 1.6 mm
Ceramic Insulation for Extended Lifetime
Ideal for Scanning Applications
Vacuum-Compatible Versions
Low Operating Voltage
Mounting Hardware Included
Special Controllers / Drivers Available
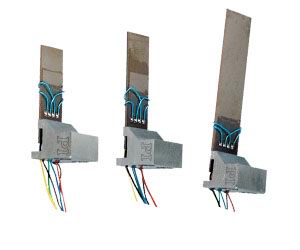
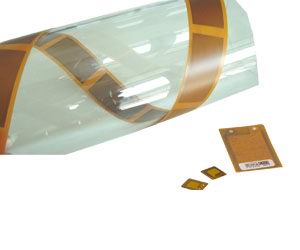
PDF Datasheet Bender Actuator Overview P-876 DuraAct™ Piezoelectric Patch Transducers
Actuator, Sensor or Energy Source
Highly Formable Ceramics
Can be Applied to Curved Surfaces
Customized Solutions on Request
Cost-Effective
PDF Datasheet Linear Actuator Online Datasheet PT120 PT140 Piezoceramic Tubes (HVPZT)
Standard & Custom Sizes
For OEM Applications
XYZ-Positioning
Sub-Nanometer Resolution
Large Diameters to 80mm
Wall Thickness as Small as 0.3 mm
PDF Datasheet PZT Tube Actuator Online Datasheet P-111 Piezo Shear Actuators: High Precision, Small, Multi-Axis Motion
Compact Multiaxis Actuators
X, XY, XZ and XYZ Versions
High Resonant Frequencies
Extreme Reliability >109 Cycles
Picometer-Resolution / Sub-Millisecond Settling Time
Optional Ultra-High-Vacuum-Compatible Versions to 10-9 hPa
Non-Magnetic and Clear Aperture Versions
PDF Datasheet Shear Actuator Online Datasheet
BACK to TOP